Unmanned Temporary Roof Support System (UTRS) For Underground Mining Operations
Underground mining faces a critical safety challenge: roof collapses account for approximately half of all mining fatalities, primarily because workers must enter unsupported, hazardous zones to manually install temporary roof support systems. Despite advances in prop design, the fundamental risk remains—human presence is required in the most dangerous areas during critical stabilization operations. Our groundbreaking innovation eliminates this risk entirely. We’ve developed an UNMANNED TEMPORARY ROOF SUPPORT SYSTEM FOR UNDERGROUND MINING OPERATIONS, removing personnel from harm’s way while delivering superior precision and reliability.
The Innovation
Our UGV system integrates advanced mechanical transport, intelligent positioning assemblies, and remote operational controls to execute complete roof support installation sequences without human entry into unsupported zones. Beyond installation, the system provides continuous real-time load monitoring and predictive failure analysis—capabilities that conventional manual inspection methods simply cannot match.

This proprietary technology is currently under patent protection (Application #2026200152)
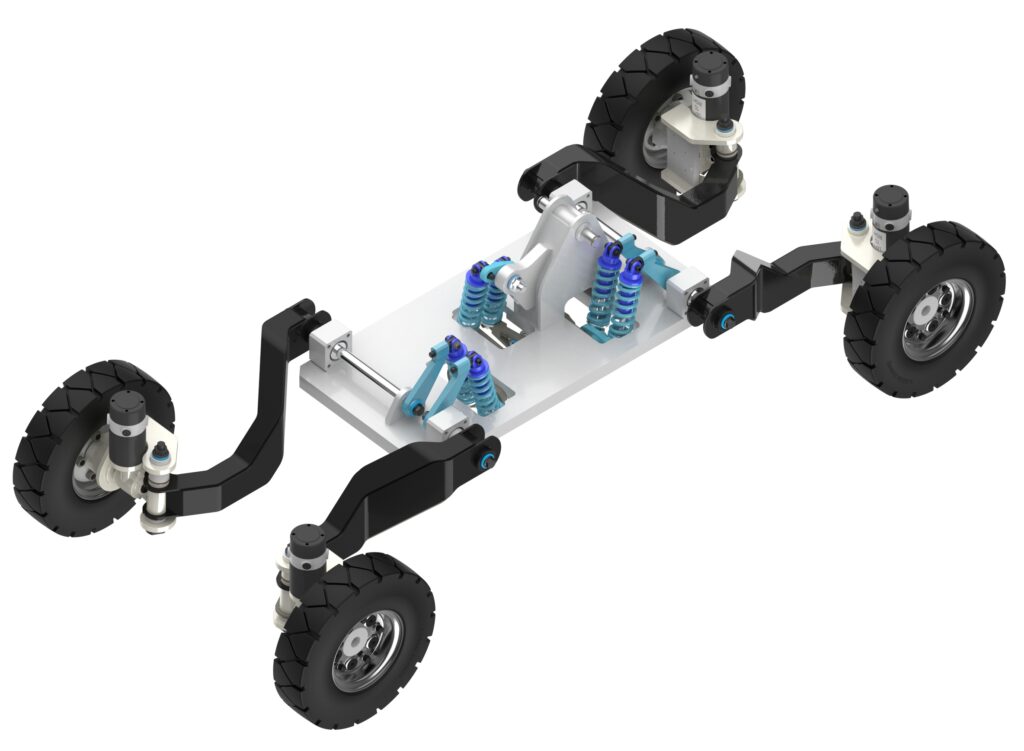
Advanced Suspension System for Extreme Terrain Stability
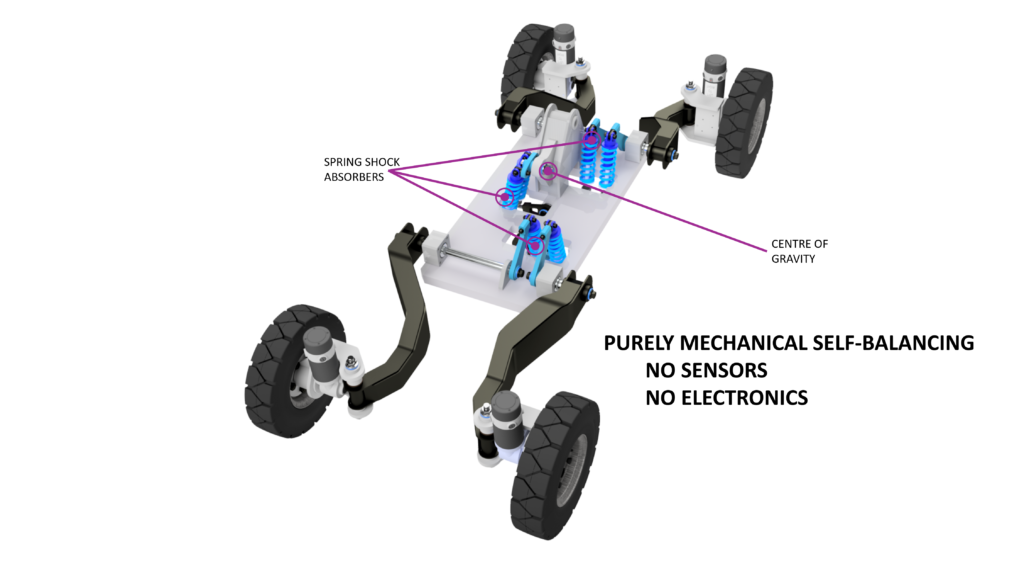
Our unmanned ground vehicle features a proprietary suspension system specifically engineered to maintain exceptional stability in the challenging terrain conditions of underground mining environments. The suspension employs a fully interconnected wheel assembly where all wheels are mechanically linked through an integrated network of rocker arm linkages and shock absorber units, with strategic connection points at the vehicle’s center of gravity. Unlike conventional suspension systems that isolate impact forces to individual wheels, our design distributes shock loads across the entire suspension network.
 |
 |

Performance Advantage
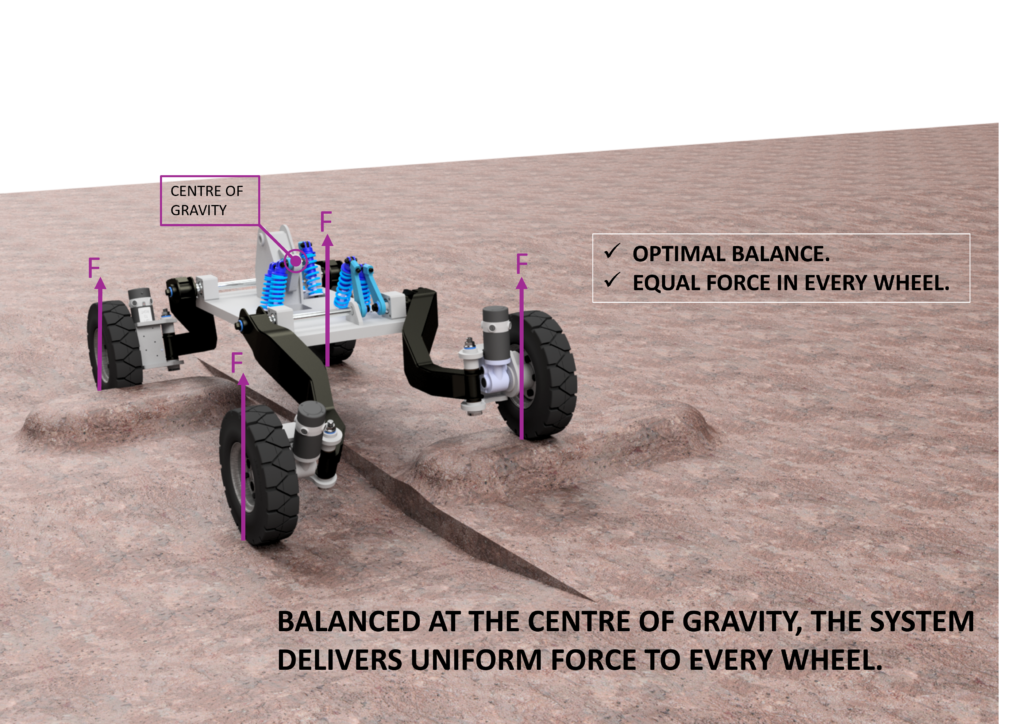
This unified suspension architecture transfers only minimal forces to the vehicle’s center of gravity, substantially reducing destabilizing moments. The result: the vehicle maintains level orientation and consistent ground contact across all wheels, even when traversing the highly irregular surfaces typical of underground mine floors—ensuring the precision and stability required for safe, accurate roof support installation.
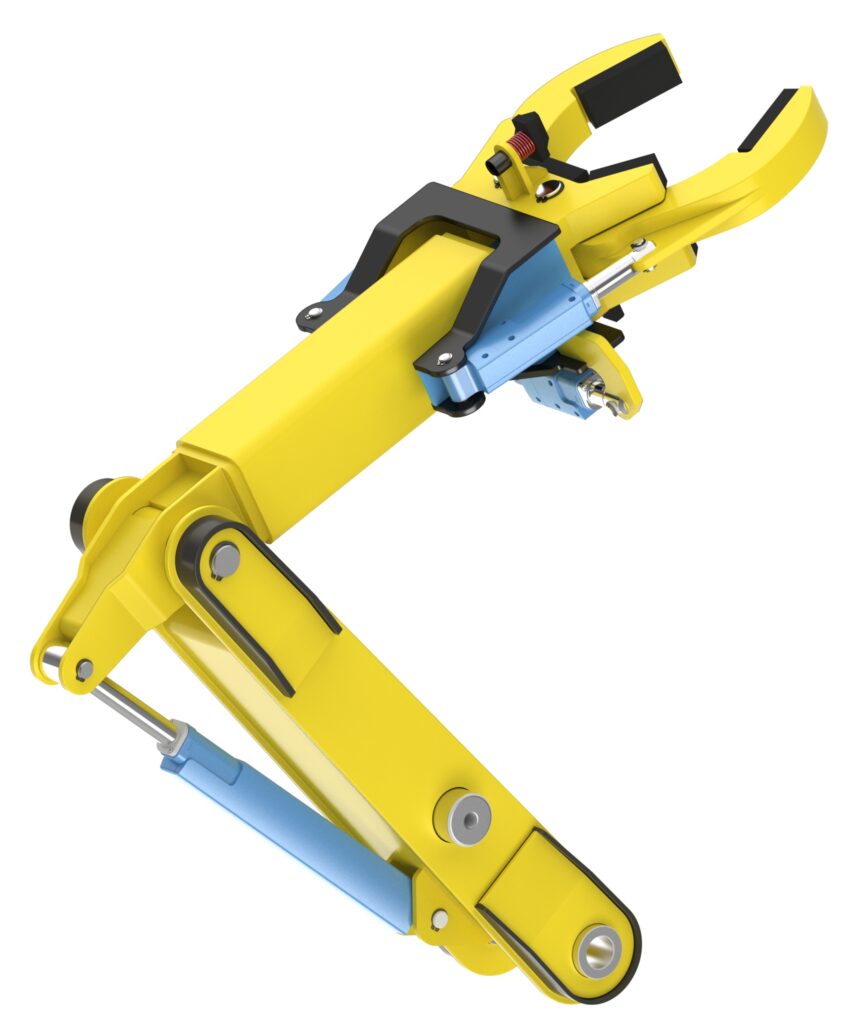
Precision Robotic Arm for Remote-Controlled Prop Installation
At the heart of our unmanned ground vehicle system is a specialized robotic arm engineered specifically for roof support prop handling and installation in confined underground mining environments, operated entirely through remote control. Under remote operator control, the robotic arm executes the entire prop installation sequence: retrieving props from onboard storage using electrically actuated gripping mechanisms, transporting them to deployment locations, and precisely positioning them on prepared surfaces. Once positioned, the arm establishes electrical connection through specialized power supply terminals, enabling controlled prop extension until the prescribed preload force against the mine roof is achieved.
Electrically-Powered Roof Support Props with Self-Locking Mechanism
Our system utilizes specially engineered roof support props powered directly from the vehicle’s onboard battery system through dedicated electrical contact interfaces, eliminating the need for manual hydraulic or mechanical operation. Constructed from high-strength steel grades, these props are engineered for repeated deployment cycles throughout their operational lifespan. When support is no longer required, the unmanned ground vehicle remotely retracts and retrieves the props, storing them onboard for future redeployment.
Remote Operation and Intelligent Control System
Our unmanned ground vehicle operates entirely under remote control, enabling operators to command all vehicle movements and prop installation functions from safe locations outside hazardous zones.
Equipped with comprehensive onboard sensors, the system provides real-time monitoring of vehicle navigation, motion, and health status. A central controller processes sensor data and executes operator commands transmitted via wired or wireless links, precisely controlling propulsion, braking, and the robotic arm mechanisms.
Ground Health Monitoring
 |
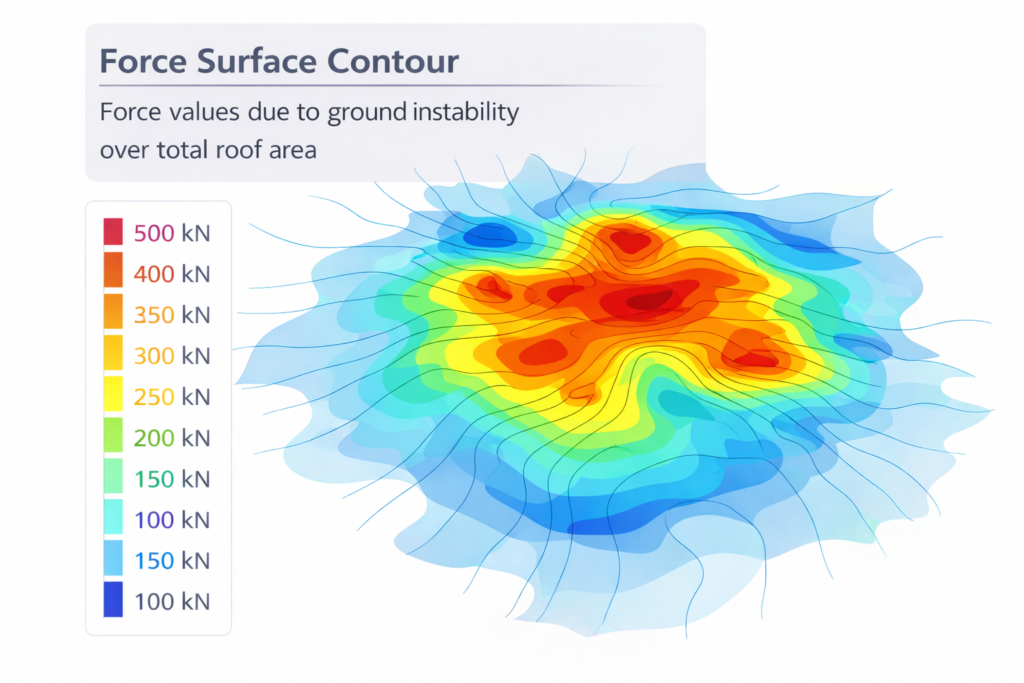 |
“This is more than an incremental improvement—it’s a fundamental reimagining of how temporary roof support should be installed, marking the end of an era where miners risked their lives for a task that technology can now perform better, safer, and smarter.”